Model Inspector
Size and Count
Matcap
Wireframe
Vertex Normals
UV Checker
Base Color
Metalness
Roughness
Clipping
CHASSIS ADAPTOR.3dm
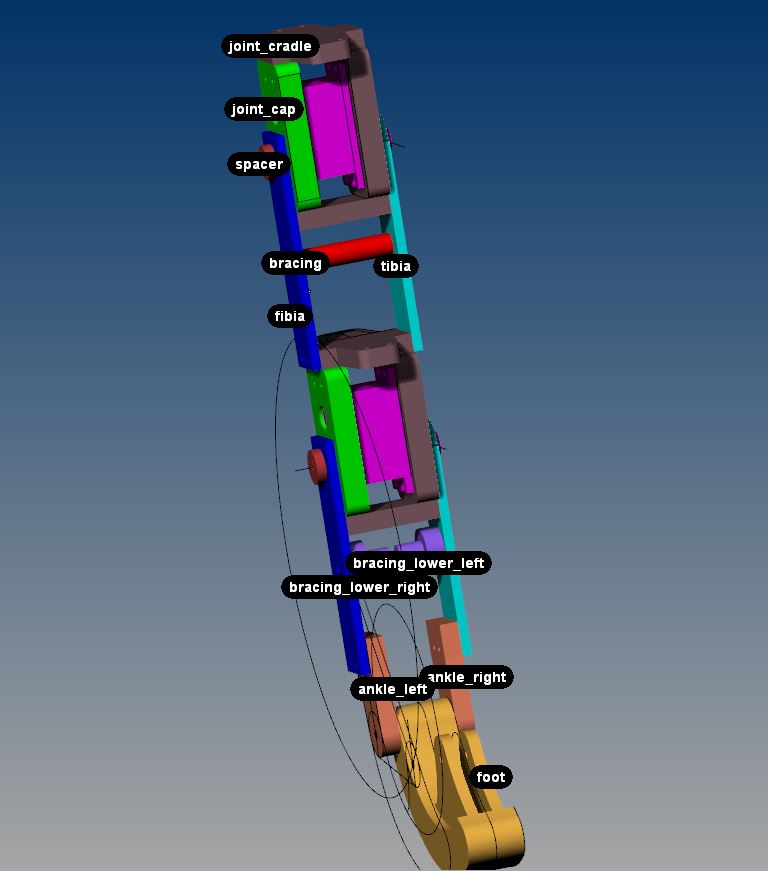
Capture.JPG
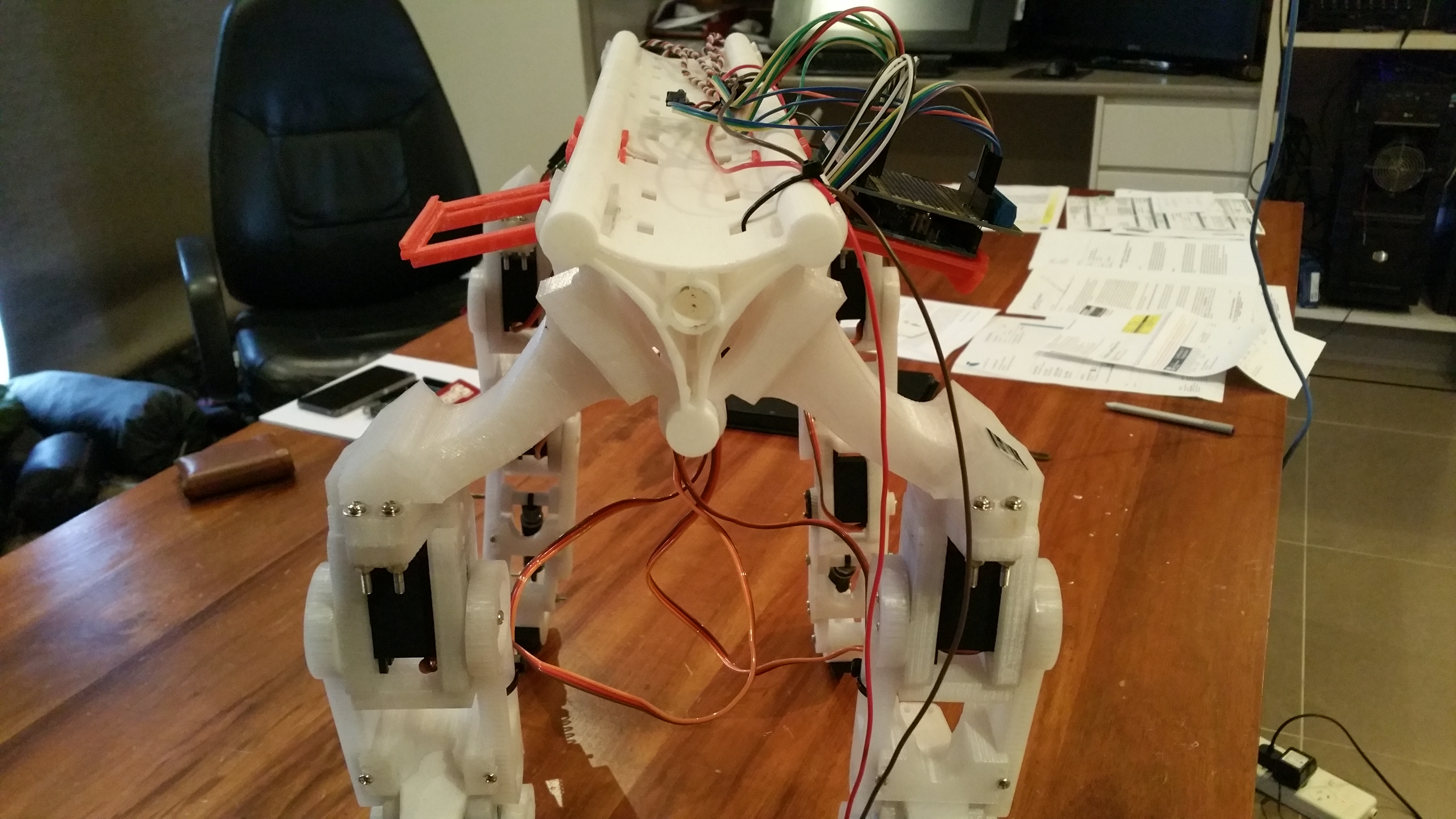
2015 01 11 17.25.33.jpg

2014 12 08 19.48.46.jpg
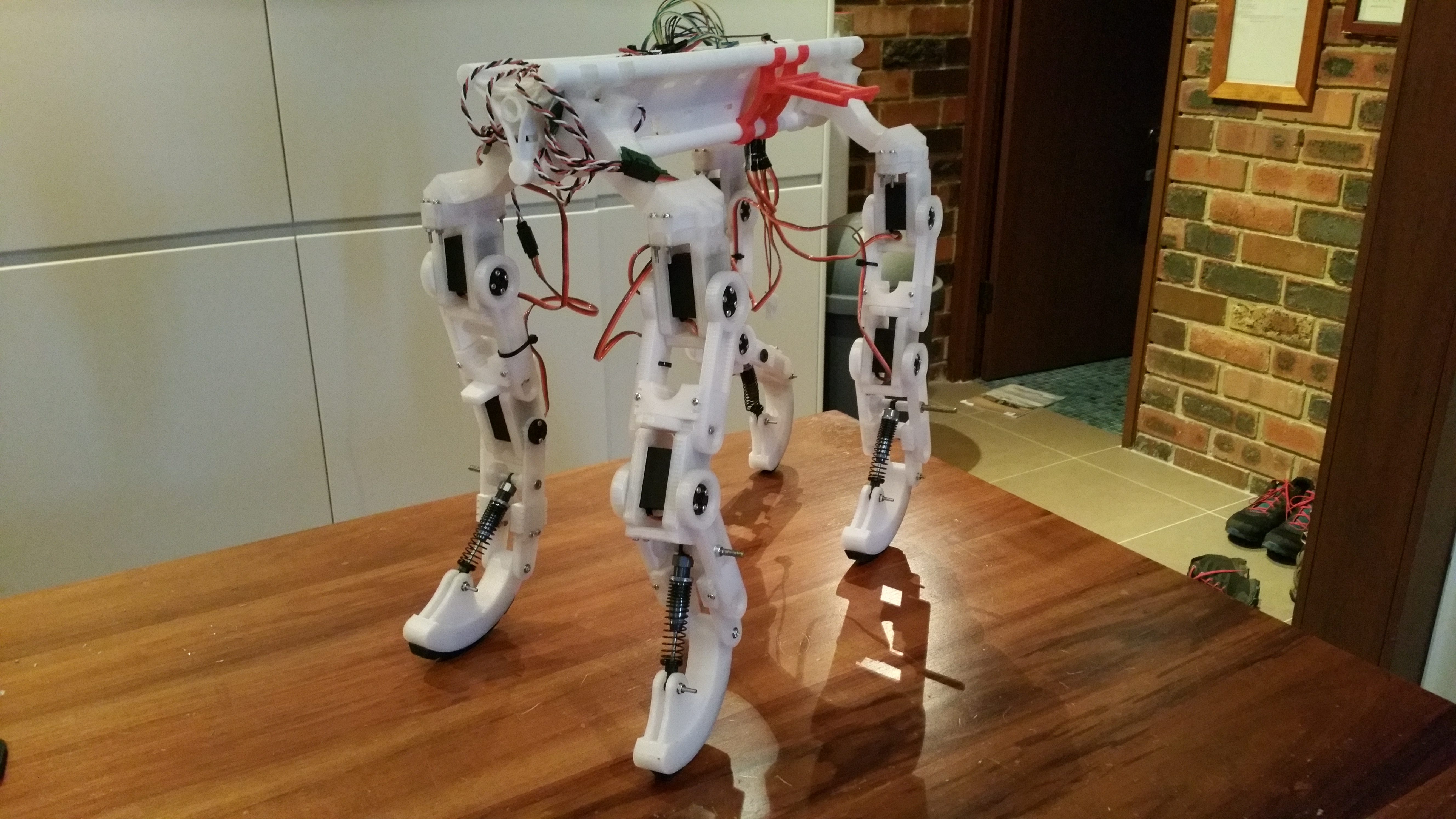
2015 01 11 17.25.08.jpg